Learn to Build an Autonomous Rover with PXFMini and Raspberry Pi
Via hackster.io
We live in the time when automation in nearly everything is what we are pursuing in life, and innovating technology with the goal of making life more intuitive and much easier is what makes many of us begin to build things with our own hands. As more and more makers and startup teams are joining the ranks of building autonomous prototypes, it seems like expecting a future filled with all kinds of automatic electronics is just the matter of time. TechDesign stumbles upon one such project by a startup team and decides to share it with you all.
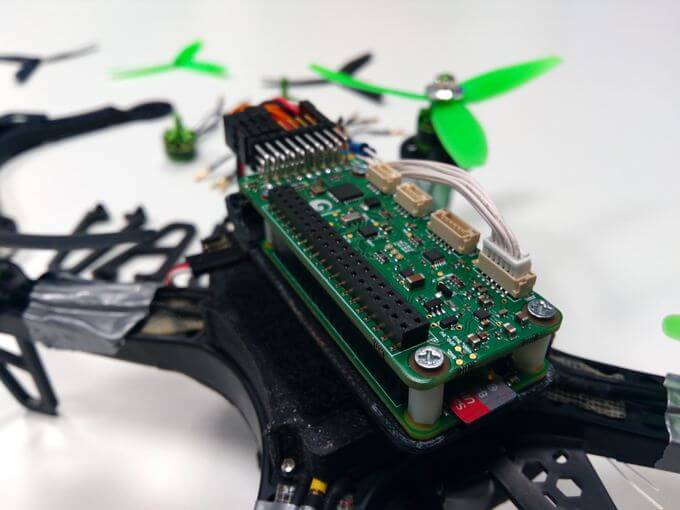
An autonomous rover powered by PXFMini and Raspberry Pi Zero
The autonomous rover, Pi0Rover, is the design of Team Erle Robotics. The drone relies on Linux kernel, which is capable of establishing a real-time system, a file system built upon Debian, and the APM flight stack gathered for the autopilot board for PXFmini. As for the actual drone, it requires several components to be able to function: a motor + ESC, an RC receiver + PPM sum, a battery, a power module and a servo motor.
Of course, the drone still requires a step-by-step building process to turn it into a functioning device. Makers first need to stack the PXFmini shield onto the Raspberry Pi Zero, which allows users to further develop it into a functioning robot or drone. While the most important step is easily accomplished by stacking one board on top of another, the set of boards still requires a compatible software to empower it. The software needs to be made up by a flight stack, a compatible kernel, daemons that can be launched once the drone is started, and other additional components.

Once these steps are done, users can follow several methods to mount the autopilot in the drone. The key is to make sure that the JST GH cable of the power module is connected to PXFmini, because that is how the battery’s power will be directed to the autopilot. Then users need to add the PWM channels to the autopilot. The way to do it is by connecting ESC cables to servo motors. Once all these steps are accomplished, it’s now time to decide how to control the drone. The Erle Robotics team proposes two ways: through the combination of Wi-Fi dongle + gamepath or Wi-Fi dongle + robot operating system (ROS.) If either of these methods doesn’t impress you, users can always get an RC controller + PRMSUM-enabled controller and add it to the autopilot.
If you want to learn more about the project’s detail, you can check out its complete profile on hackster.io. However, in case you want to get a similar solution that is already designed for you, you can check out Nuvoton Technology‘s Copter. As always, TechDesign will continue to bring you other excellent maker projects in the coming weeks, so stay tuned.









Hey There. I came across your blog using msn. This is an incredibly
well written article. I’ll make sure to bookmark it and come back to learn more of your useful information. Thank you for the post.
I’ll certainly comeback.
Im not that much of a internet reader actually
yet your blogs very nice, ensure that is stays up! I’ll go on and bookmark your site to return later.
Cheers
Really good information. Lucky me I recently found your blog by accident
(stumbleupon). I’ve saved it for later!
It’s a pity you don’t have got a donate button! I’d certainly
donate to this fantastic blog! I suppose
right now i’ll be happy with book-marking and adding your Feed to
my Google account. I enjoy fresh updates and may share this website with my Facebook group.
Talk soon!
Thanks for the feedback, we will keep it up!
Howdy I am so happy I found your web site, I
really found you by mistake, while I was searching on Aol for something else,
Nonetheless I am here now and would just like to say kudos for a marvelous post and a all
round interesting blog (I also love the theme/design), I don’t have time to read
through it all at the moment but I have book-marked it and
also added in your RSS feeds, so when I have time I will be back
to read more, Please do keep up the fantastic job.
Thanks for the feedback! We will keep it up!
Nice post. I was checking constantly this blog and I am impressed!
Very helpful information particularly the remaining phase 🙂 I care for such information much.
I was previously seeking this certain info for the very long time.
Thanks and best of luck.
Thanks for the feedback! We will keep it up!
It’s perfect a chance to make a couple of plans
for the longer term and it is time to be happy. We have learn this post and when I may just I want to counsel you some
attention-grabbing issues or suggestions. Maybe you can write subsequent articles discussing this article.
I desire to learn more things approximately it!
Thanks for the feedback! We will keep it up!
I have got read a few excellent stuff here. Definitely price bookmarking for revisiting.
I surprise how much effort you set to create this kind of great informative site.
Thanks for the feedback, we will keep it up!
Hi, for all time i used to check website posts here early
in the daylight, for the reason that i enjoy to gain knowledge of more and more.
Thanks for the feedback, we will keep it up!